Nätutjämningsmanualen
Inledning
Nätutjämningsmanualen är både en manual och ett studiehäfte där de olika funktionerna och en del av teorin bakom dem beskrivs. Topocad Nätutjämning bygger på beräkning med Minsta Kvadratmetoden och till denna har det skapats ett antal funktioner för att dels få in data på lämpliga sätt och dels metoder att söka fel med. Det finns även olika funktioner för att skräddarsy utseendet på de resultat man vill presentera.
De metoder som valts har så långt som möjligt följt HMK:s rekommendationer och regler, främst HMK Geodesi: Stommätning 2020 (Lantmäteriet) och SIS:TS 2016 (SIS). Detta innebär bl. a. uppdaterade rubriker och rapporter så att GUM-terminologi används i hela programmet. Felgränser (och formler för dessa) är uppdaterade så att de följer de nya reglerna i HMK2020.
För att få in mätdata i nätutjämningen kan man antingen importera data från en mätdatafil (SUR-fil) eller också knappa in mätningarna direkt i nätutjämnings-modulen.
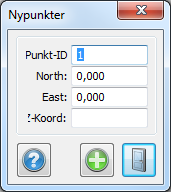
Vid import eller inknappning av mätdata kontrollerar modulen automatiskt om från- eller tillpunkt i en mätning finns i den förvalda polygonpunktsfilen, och därmed är koordinatsatt. Om så är fallet kommer punktens koordinater att hamna på punktens rad under fliken Punkter, och punkten sätts som känd. Finns inte punkten i polygonpunktsfilen så klassas den som ny (okänd). Det går också att manuellt knappa in koordinater för en punkt som klassats som nypunkt och sedan sätta den som känd.
I samband med import av mätdata väljer man instrumenttyp, som tidigare definierats i Systeminställningar. I samband med detta bestäms även den precision som gäller för varje enskild mätning, då precisionen för mätningen är knuten till det valda instrumentets prestanda. Precisionen för mätningarna ligger i sin tur till grund för viktningen, som styr hur mycket eller lite en viss mätning ska påverka slutresultatet.
Efter att man matat in indata så väljer man beräkningstyp. Man kan här t ex välja om utjämningen ska vara i plan eller höjd och om kända punkter ska vara låsta eller frikopplade (fri utjämning). Sedan genomför man utjämningsberäkningen, och kan efter detta se under fliken Summering om resultatet var godkänt.
Nätets utseende kan se under fliken Grafik, där även ett översiktsfönster för nätet finns. Detaljerad beskrivning av resultatet finns under fliken Rapport. Det finns sedan funktioner för felsökning av mätningar eller kända punkter. Funktionerna använder så långt det är möjligt jämförelser av resultatet med en fastställd felgräns som kan ställas in under Projektinställningar. Dessa felsökningsmetoder finns under menyvalet Tester.
Slutligen kan rapporten skrivas ut i olika former. De beräknade punkterna kan sparas i en koordinatfil eller exporteras direkt till en ritning.
Utjämningsflödet
Utjämningsflödet
- Skapa först en katalog för dina mätdata- och utjämningsfiler och välj den som Projekt.
- Ställ in Systeminställningar så att de passar det aktuella projektet (Koordinatsystem, Kända punkter (fil eller databas), Gränsvärden, Instrumentspecifikationer, Enheter, Grafik).
- Om höjder/höjdmätningar saknas och man gör en planutjämning så måste en ungefärlig medelhöjd för projektet anges under Koordinatsystem för att ellipsoid(höjd)-korrektion ska kunna genomföras.
- Kontrollera speciellt att en polygonpunktsfil (eller databas) finns, innehåller rätt kända koordinater, stämmer med koordinatsystemets Y-offset (t ex 60:-5) samt är kopplad till projektet.
- Det är också viktigt att kontrollera att det använda instrumentet finns med i instrumentinställningarna samt att rätt värden är inknappade. Missa inte Centreringsfel XY som oftast anges till 0.002 m.
- Importera en rådatafil till en ny mätdatafil.
- Genomför Reducering av satsmedeltal och ta ut en rapport på detta (om det behövs). Spara den reducerade mätdatafilen i projektkatalogen.
- Upprepa punkt 6 och 7 för alla aktuella rådatafiler.
- Skapa ett nytt nätutjämningsdokument och importera alla reducerade mätdatadokument (alternativt kan en nätutjämning skapas direkt från mätdatadokumentet).
- Kontrollera översiktligt mätdata, punkter (att rätt punkter fått kända koordinater) samt instrumentinställningar.
- Gå till Inställningar och välj typ av utjämning (plan, höjd eller båda).
- Välj Fri utjämning samt fullständig rapport (allt).
- Beräkna och kontrollera under Summering att nätet är godkänt.
- Genomför de tester som är relevanta för mätningarna och editera dem om det behövs.
- Om mätningar uteslutits och nätet försvagats för mycket p g a detta (kontrollera k-talen, relativ redundans ska helst inte vara under 0.35) så kan ommätningar behövas. Genomför dem och upprepa punkt 6-14 tills mätningarna är godkända.
- Genomför en tvångsutjämning (Använd Projektinställning). Om nätet uppvisar fel som inte fanns i den fria utjämningen så genomför Test av kända punkter. Koppla eventuellt loss dåliga kända punkter. I vissa fall kan man behöva ta fram nya koordinater (t ex med statisk GNSS) på vissa punkter om nätet blir för instabilt utan dessa.
- Upprepa beräkningarna tills det går att genomföra en godkänd tvångsutjämning där även alla tester är godkända.
- Exportera resultatet som ritning, rapport och/eller spara de nya punkterna som kända punkter.
Importera mätdata till nätutjämning
Importera mätdata till nätutjämning
Nätutjämningen använder sig av Topocads mätdatafiler (.SUR) som underlag för beräkningarna (se separat kapitel om mätdatafiler). Mätdatafilen kan bestå av enskilda mätningar, mätningsserier, fria stationer, polygontåg, detaljmätningar och även upprepade mätningar mot samma objekt.
För att hämta in mätningar till nätutjämningsformuläret:
- Skapa en ny nätutjämning (Nytt|Nätutjämning) och gå till fliken Nätutjämning och välj Importera. Välj sedan den mätdatafil som du önskar. Detta går att upprepa så att flera mätdatafiler importeras till samma nätutjämning. Det går också att gå direkt från en mätdatafil och skapa en nätutjämning genom att ha mätdatafilen öppen och välja Exportera|Nätutjämning.
- Instrument
- Här anges det instrument som använts i mätdatafilen. Instrumentet måste ha definierats under Systeminställningar |Instrument. Klickar man på ”plus-knappen” Lägg till, som finns i denna meny, så kan man ange ett instrumentnamn och sedan definiera de egenskaper som instrumentet har. Observera att instrumentet måste ha definierats innan mätdatafilen importeras.


Förutom fördefinierade instrumenttyper så går det också att går det också att skapa användardefinierade totalstationer och avvägare (kan väljas när man tryckt på Lägg till) genom att ange egna parametrar för atmosfärskorrektioner.
- Vilka typer av stationer ska importeras?
Detta avser hur punkten som instrumentet står på ska klassas.
- Kända stationer (polär inmätning)
- Fria stationer (om mätningarna klassats som en fri station vid importen)
- Polygontåg (standardläget, normalt beräknas enbart de punkter som finns markerade med mättypen polygontåg).
- Avvägningsdata
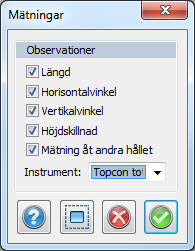
- Vilka typer av observationer vill du importera?
- Bakåtobjekt, dvs de som har mättyp Station och har kodats med punkttypen bakobjekt eller polygonpunkt i mätdatafilen.
- Punkt – nypunkter (inkluderar även detaljpunkter).
- Annat. Detta innebär de mätningar som har markerats med mättypen Annat i mätdatafilen.
- BO om möjligt, de punkter som markerats som bakåtobjekt om möjligt, dvs om kända punkter med samma namn finns i projektets koordinatfil. Annars räknas de som detaljpunkter.
- Sats- och stationsmedeltal. Mätningar från reducering av riktningsserier.
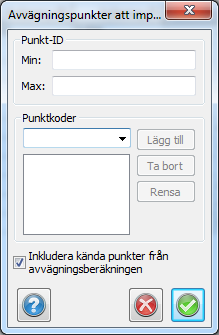
- Avvägningsdata. Ett separat fönster öppnas där man kan filtrera på ett Min eller Maxvärde för Punkt-ID eller välja de Punktkoder som ska importeras.
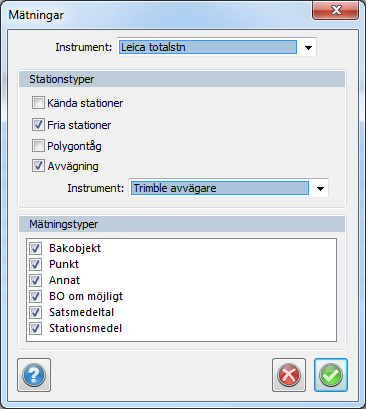
De importerade mätningarna hamnar under fliken Mätningar i nätutjämningen. Här kan man editera eller ta bort befintliga mätningar, samt lägga till egna.
Inställningar
Inställningar
Under fliken Inställningar kan man göra ett flertal snabbval. Dessa inställningar ändrar inte mätdata/observationer utan ger enbart programmet instruktioner hur beräkningen av mätningarna ska ske. Detta innebär att även om man för en observation anger att den ska beräknas i plan och höjd så kan snabbvalet begränsa detta till enbart plan om så är inställt.
Inställningarna kan göras under tre olika flikar:
Generellt
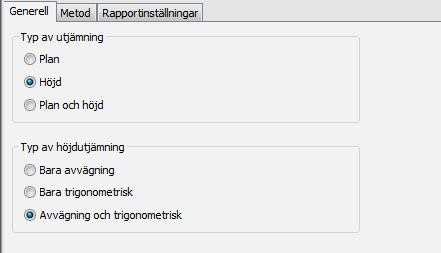
- Typ av utjämning:
- Plan
- Höjd
- Plan och höjd
Om beräkning i plan och höjd väljs så sker beräkningen separat för plan och höjd, men i redovisningen kombineras de.
- Typ av höjdutjämning: (endast vid utjämning i höjd eller plan och höjd)
- Bara avvägning (endast avvägda mätdata ingår i höjdutjämningen)
- Bara trigonometrisk (endast trigonometriska mätningar ingår)
- Avvägning och trigonometrisk (bägge mättyperna ingår)
Metod
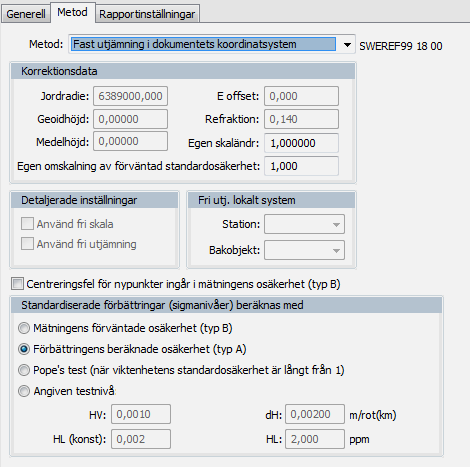
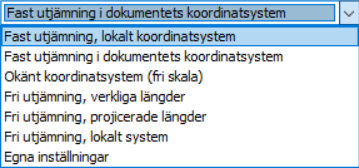
- Metodval:
Dessa snabbval styr beräkningen och ”kör över” de inställningar som gjorts för varje enskild mätning under mätningsfliken (de enskilda inställningarna ändras dock ej). Fördelen med detta är att du är säker på att den valda beräkningstypen verkligen gäller alla mätningar. För att använda de individuella inställningarna för varje enskild mätning så måste du välja ”Egna inställningar” i denna lista.
Fast utjämning i dokumentets Genomför en fast utjämning (med kända
koordinatsystem punkter låsta) och de inställningar som gjorts under Projekt- eller Systeminställningar. Främst är det fliken Koordinatsystem som är av intresse då man där väljer koordinatsystem. Om detta inte är Lokalt så sker projektionskorrektion för alla mätningar. Även ellipsoidkorrektion (höjdkorrektion – projektion av längden på ellipsoiden) beräknas vid detta snabbval.
Lokalt koordinatsystem Fast utjämning av nätet. Använder ej korrektioner för projektion och ellipsoid.
Fri utjämning Frikopplar alla punkter så att fel hos kända koordinater inte påverkar nätet. Bra för ett lokalt nät som ska vara så spänningsfritt som möjligt, eller om man misstänker att det finns fel i de kända koordinaterna. Om denna utjämning ger ett bra resultat i ett välbalanserat nät tyder detta på att alla mätningar är OK och att fel i en vanlig (tvångs)utjämning beror på fel i kända koordinater.
Tänk på att en mätning i ett tåg av mätningar som slutar vid en känd punkt räknas som detaljmätning i fri utjämning, vilket gör att grova fel inte kan spåras hos sådana mätningar. För att fri utjämning ska kunna genomföras framgångsrikt så bör nätet vara utformat som slingor eller trianglar. Polygontåg utan slingor kan ge osäkra resultat. Fri utjämning kan beräkna ett nät helt utan kända punkter i ett lokalt system.
Fri utjämning delas upp i metodvalen Fri utjämning, verkliga längder och Fri utjämning, projicerade längder. Den förstnämnda ger bara atmosfärskorrigerade, verkliga längder (för korrektionsfria nät, se SIS:TS), medan den sista metoden ger kartprojektionsanpassade längder (med Projektions- och ellipsoidkorrektion). Den sistnämnda metoden är bra om man vill passa in fria nät på kända punkter med Kongruent transformation efter utjämningen (då måste längderna vara projektionskorrigerade).
Fri utjämning, lokalt system Här begränsar man de kända punkterna till två och låter programmet beräkna en bäring från stationspunkten, som behåller sina koordinater. Även denna metod tar bort spänningar från fel i kända punkter, men behåller stationspunktens koordinater. Objektspunkten behåller sin bäring men får nya koordinater.
Egna inställningar Använder helt och hållet inställningarna under fliken Mätningar, d v s om ellipsoid- eller projektionskorrektion ska beräknas för respektive mätning. Även inställningar under rubriken Detaljerade inställningar (Fri skala och Fri utjämning) blir valbara. Se mer utförlig beskrivning under denna rubrik.
Okänt koordinatsystem Använder fri skala för att eliminera ett skalfels påverkan på längderna. Denna metod är passande om man får stora fel på längderna och misstänker att man har ett felaktigt Y-(E)-tillägg på koordinaterna (påverkar projektionskorrektionen) eller har en längdmätare med ett skalfel. Om en utjämning med fri skala drastiskt sänker längdfelen så kan man förmoda att man har ett sådant fel.
Metoden ger möjlighet att bedöma om en skalskillnad är statistiskt säkerställd och med hög säkerhet beräkna en eventuell skalfaktor.
Denna metod bör enbart användas för att spåra skalfel och utreda orsaken till dem. Metoden är inte lämplig för slutgiltiga beräkningar.
- Korrektionsdata
De värden som anges här blir inaktiva (gråa) om man valt ett snabbvalsalternativ där värdena antingen hämtas från projektinställningarna (finns under Inställningar|Projekt alternativt System) eller inte används i beräkningen.
- Jordradie- behövs för korrektionsberäkningar. Som standardvärde används 6370000 för Sverige. Om man använder ett RT90- eller SWEREF-koordinatsystem i projektinställningar och har angett snabbvalet Använd projektinställningar så kommer programmet att beräkna en jordradie enligt formler i HMK Geodesi Stommätning och data för respektive ellipsoid (se nedan).
- Geoidhöjd- geoidens (»vattenytans) höjd jämfört med kartprojektionens referensellipsoid (för RT90 gäller ellipsoiden Bessels och för SWEREF 99 gäller GRS-80). Om man använder ett koordinatsystem i projektinställningar och har angett snabbvalet Fast utjämning i dokumentets koordinatsystem så kommer programmet att beräkna en geoidhöjd med hjälp av geoidhöjdsmodellerna RN92 (RT90) eller SWEN17 (SWEREF 99).
- E offset- tillägg i E (Y), för RT90- och SWEREF-koordinater används ofta tillägg för att undvika negativa Y-värden. Detta värde är mycket viktigt att kontrollera om man ska låta nätutjämningen beräkna projektions-korrektionen. Om man t ex använder äldre RT90-koordinater med det standardtillägget 1.500.000 men glömmer att ange det som Y-offset får en 100 m-längd ett fel i storleksordningen 2.7m! I Projektinställningar| Koordinatsystem så väljer man ett system med ett givet tillägg som man inte behöver ange separat i nätutnämningen. Detta förkortas ofta; t ex betyder RT90 5 gon V 60:-1 att man tar bort 6 000 000 från X-koordinaten och adderar 100000 till Y-koordinaten. De använda projektionskorrektions-formlerna finns beskrivna i HMK Geodesi Stommätning.
- Refraktion- ljusets brytning i atmosfären. Standardvärdet för refraktionskoefficienten är 0.140 för svenska förhållanden. Refrak-tionen påverkar beräkning av höjdskillnad och används i beräkning-arna enligt definitioner i HMK Geodesi Stommätning.
- Medelhöjd- om man ska beräkna ellipsoidkorrektion men inte har Z-koordinater på sina punkter (behövs för beräkningen) kan man ange en medelhöjd över havet för det nät man ska beräkna. För en längd på 1000m resulterar ett höjdfel på 10m i ett korrektionsfel på bara 2mm, så man behöver bara en ungefärlig höjd på punkterna, meternoggrannhet räcker oftast. De använda höjdkorrektions-formlerna finns beskrivna i HMK Geodesi Stommätning.
- Detaljerade inställningar (aktiv vid snabbvalet Egna inställningar)
- Använd fri skala - används om man vill beräkna skalan om denna är okänd, för sökning av skalfel hos nät med stora förbättringar för längder, eller för test av ett nät med känd skala för att se om den angivna skalfaktorn verkar stämma.
- Använd fri utjämning - utjämnar nätet fritt utan att ta hänsyn till fasta kända koordinater. Bra för nät som behöver vara spänningsfria. Se Fri utjämning under Nätutj.|Metod – Metodval. Då fri utjämning här sker under snabbvalet Egna inställningar så kommer ellipsoid- och projektionskorrektion att genomföras för en viss mätning om man har angett det på mätningens rad i mätdatafliken.
Om man har använt tvångscentrering konsekvent under mätningarna (haft kvar stativ med trefot men bytt plats på instrument och prisma) så kommer man ju sikta mot exakt samma punkt som man mätte ifrån. Detta innebär rent praktiskt att effekten av centreringsfel inte kommer att påverka mätningarnas precision. Centreringsfelet läggs istället på de beräknade nypunkternas medelfel.
När man ansluter mot en känd punkt så kommer däremot centreringsfelet att påverka, eftersom de kända koordinaterna gäller punkten på marken och inte trefotens läge över punkten. Programmet kommer därför i normalläge att ta med centreringsfel från kända punkter men ej nypunkter vid beräkning av mätningarnas apriorimedelfel. Detta är närmast verkligheten om tvångscentreringar dominerar i nätet. Om man däremot plockat ner stativen vid de flesta mätningarna så bör man även ta hänsyn till centreringsfelen över nypunkterna vid beräkning av apriorimedelfelen.
Detta innebär sammanfattningsvis följande: Om man övervägande använt tvångscentrering i nätet så ska rutan ”Centreringsfel för nypunkter ingår i mätningens osäkerhet (typ B)” INTE vara förbockad, om man istället rivit stativen mellan mätningarna för det mesta bockas den för.
- Övriga inställningar för metoder
- Ruta för Egen skaländring. I de fall som man upptäcker en signifikant skaländring vid test av kända punkter, menar nya HMK 2020 att man ska kunna multiplicera alla längder med den framräknade skalfaktorn. Detta är utöver den skalfaktor som hör ihop med den metod man valt. Om man t ex har valt Fast utjämning i dokumentets koordinatsystem så blir det ju en projektion som har en skala skild från 1. Den egna skalfaktorn kommer att multipliceras med projektionens, och är som default alltid 1.
- HMK anger också att om man får ett resultat som är mycket bättre än förväntat så kommer felsökningen inte att fungera. Man kan då skala om alla apriorimedelfel med det grundmedelfel man fått och räkna igen. Därför behövs rutan Egen omskalning av förväntad standardosäkerhet (som i normala fall har 1 som default). Man kan då göra en utjämning och (om den blir extremt bra) ta grundmedelfelet och skriva in det i denna ruta och räkna om.
- Valknappar för olika typer av standardiserade förbättringar (sigmanivåer) för att följa HMK 2020 och för att förtydliga hur de beräknas. De är:
- Mätningens förväntade osäkerhet (typ B), mätningens förbättring jämfört med förväntad standardosäkerhet (medelfel), ibland kallad BVH-kvot
- Förbättringens beräknade osäkerhet (typ A), Mätningens förbättring jämfört med sitt beräknade medelfel, HMKs rekommenderade metod.
- Pope’s test (när viktsenhetens standardosäkerhet är långt från 1)
- Angiven testnivå
- Den nya sigmanivåtypen Pope´s test (grundmedelfel långt från 1) är en anpassning av ”Pope’s kriterium” som HMK 2020 har med i utjämningsbeskrivningen. Det är ett test som är bättre på att peka ut fel än de andra metoderna om grundmedelfelet är mycket större eller mindre än 1, vilket händer om man har felbedömt de förväntade apriorimedelfelen, eller gjort grova fel. Testet använder t-fördelningen för att ta fram en testnivå (för att klassa ett testvärde som fel) som normalt är ett decimaltal från 1.96 och uppåt, men i detta fall har värdena för både testnivå och testvärde skalats upp så att sigma 3-gränsen gäller här också.
- Ibland vill man jämföra sina testvärden med en testnivå istället för med apriorimedelfel för angivet instrument eller medelfel från utjämningen. Det kan vara när man t ex använt ett instrument som är mycket bättre än kravspecifikationen, men där man nöjer sig med att ha kravspecifikationen som jämförelsenivå. Däremot vill man vikta korrekt och därför ha med korrekta instrumentspecifikationer (inte från kravspecifikationen) i viktberäkningen.
Värdena är i ordningen HV (gon), HL (konst. m), HL (ppm), dH (m/rot(km).
Mätningar
Förklaringar till Mätningar
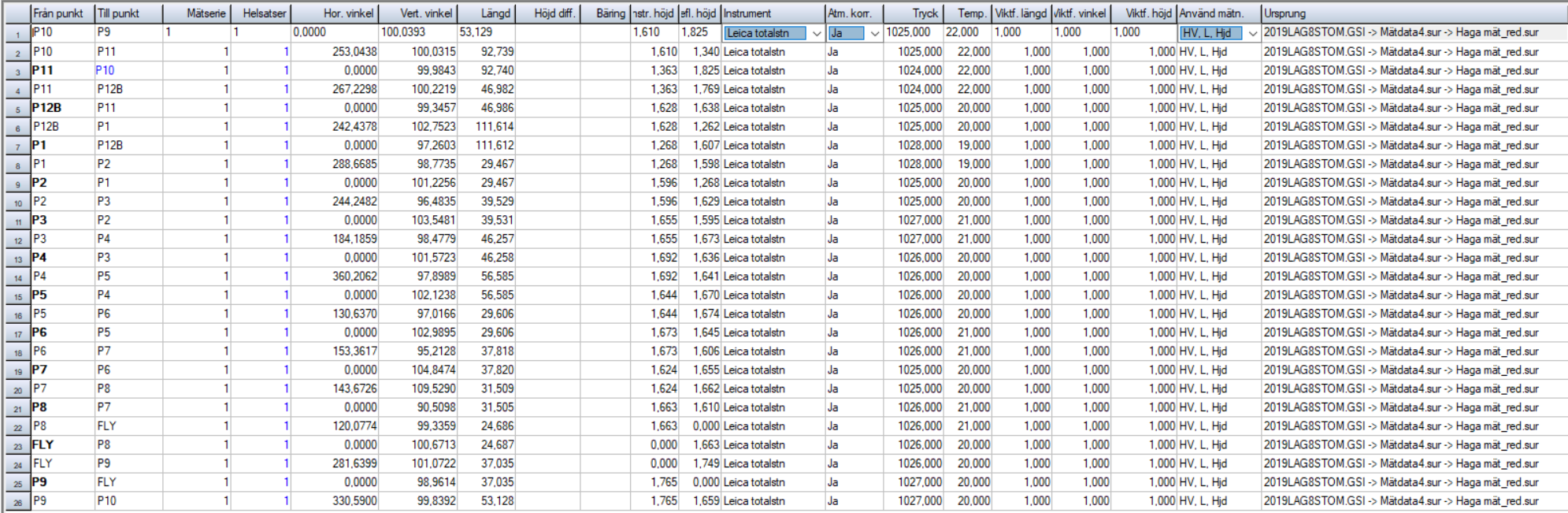
Här följer en förklaring till kolumnerna under fliken Mätningar:
Från punkt Markerar från vilken punkt du har gjort mätningen, det vill säga stationspunkten. Detta kan vara både en känd punkt och en fri station, eller en nypunkt mitt i ett polygontåg. Varje ny stationspunkt visas med fetstil för att göra riktningsserierna mer lättöverskådliga.
Till punkt Markerar till vilken punkt observationen är gjord. Detta kan vara både en känd eller en ny punkt.
Mätserie nr I normalfallet mäter man en riktningsserie i taget per station och byter sedan stationspunkt. Om man mätt så, behöver man inte bry sig om denna kolumn som då har defaultvärdet 1 på alla mätningar. Om däremot specialfallet inträffar att man mäter en till riktningsserie från samma station direkt efter den första mätserien, så måste serierna skiljas från varandra på något sätt. Sker inte detta räknar programmet båda serierna som en och samma, vilket kan orsaka fel. Vi skiljer då mätserierna åt genom att man manuellt ger den andra riktningsserien värdet 2 i mätseriekolumnen. Har vi en tredje serie från samma station direkt efter tvåan ger vi dessa mätningar värdet 3 osv. Om flera stationsetableringar sker i rad från samma punkt i en mätdatafil så kommer nätutjämningen vid importen att sätta olika mätserienummer automatiskt för att separera mätserierna.
Ant. helsatser Antalet helsatser för mätningar (importeras från mätdatafilen). Detta möjliggör att standardosäkerheten (medelfelet) för mätningar automatiskt beräknas rätt oavsett antal helsatser. Om mätningen endast är i ett cirkelläge så anges antalet som 0.
Hor. vinkel Horisontalvinkel.
Vert. vinkel Vertikalvinkel.
Längd Lutande längd. Om vertikalvinkelfältet på samma rad är blankt så räknas längden som horisontell. Längder och höjdskillnader som medeltalsbildas i nätutjämningen får uppdaterade standardosäkerheter (medelfel).
Höjd diff. Mätt höjddifferens mellan frånpunkt och tillpunkt. Används främst för avvägningsdata.
Bäring Här kan man ange en känd bäring mellan två punkter. Det kan vara antingen en ”påhittad” bäring för att ge nätet en önskad orientering (vridning mot norr), eller en bäring mätt med gyroteodolit.
Instr. höjd Instrumentets höjd över punkten.
Refl. höjd Reflektor- (prisma-) höjd över punkten.
Instrument Anger vilket instrument som har använts, vilket i sin tur definierar mätningens precision (mått på noggrannheten), som visas under fliken Instrument.
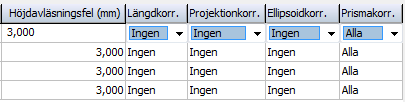
Proj. korr Projektionskorrektion - anger om denna ska användas eller ej för mätningen. Snabbval finns i Inställningar (se detta kapitel för mer detaljerad beskrivning) om man valt Använd projektinställning, som generellt kopplar av/på denna funktion för alla mätningar oavsett vad som angetts för varje enskild mätning. De använda projektionskorrektionsformlerna finns beskrivna i HMK Geodesi Stommätning kap. C2.
Ellips. korr Ellipsoidkorrektion, anger om denna ska användas eller ej för mätningen. Korrektionen reducerar mätta längder till ellipsoiden. De använda höjdkorrektionsformlerna finns beskrivna i HMK Geodesi Stommätning kap. C1. Liksom för projektions-korrektionen kommer vissa snabbval att ”köra över” de individuella inställningarna för en mätning.
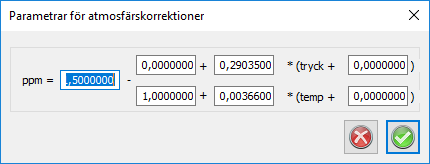
Atm. korr. Atmosfärskorrektion av längder. Denna funktion påverkas på samma sätt som projektionskorrektion av snabbvalet i Inställningar. Korrektionerna beräknas enligt följande (erhållet från instrumentmanualer från resp. tillverkare):
Leica
ppm=281.5-((0.29035* tryck)/(1+0.00366* temp))
Trimble/Geodimeter
ppm=275-((79.53*tryck)/(273+temp))
Topcon
ppm=279.6-((79.53*tryck)/(273.2+temp))
Sokkia Laser
ppm=282.59-((0.2942*tryck)/(1+0.003661*temp))
Sokkia Reflektor
ppm=278.96-((0.2904*tryck)/(1+0.003661*temp))
Motsvarande korrektionsvärden för andra instrument kan användas när man skapar en användardefinierad instrumenttyp.
Tryck och temperatur anges i mbar respektive grader. Längdernas korrektion fås sedan genom att multiplicera dem med ppm-talet. Om längden anges i km så fås korrektionen i mm.
Tryck Atmosfärstryck. Hänsyn till denna tas enbart om Ja har angivits i kolumnen Atm. korr. Om du har värden i mmhg räknar du om dem till mbar genom att multiplicera med 1.3333, vilket enkelt kan göras med funktionen Sök/Modifiera som du aktiverar genom att högerklicka.
Temp Temperatur i grader. Hänsyn till denna tas enbart om Ja har angivits i kolumnen Atm. korr.
Viktf. längd Viktfaktor längd. Vikter för längder räknas automatiskt ut genom formeln P= 1 / mf2, där mf är mätningens medelfel som fås ur instrumentdata. Detta värde behöver normalt inte ändras av användaren. Om man hamnar i situationen att man vet att en mätning är sämre än väntat på grund av yttre omständigheter (t ex väder, ljusförhållanden, instrumentfel), eller om man av någon annan anledning vill att vissa mätningar ska påverka resultatet mindre, kan man vikta ner mätningen. För längder görs det genom att ändra viktfaktorn från 1 (=opåverkad) till ett lägre värde. Ändrar vi t ex till 0.5 kommer just den längden att påverka resultatet hälften så mycket som normalt (den tidigare beräknade vikten halveras).
Viktf. vinkel Viktfaktor vinkel. Se ovan för förklaring.
Viktf. höjd Viktfaktor höjd. Se ovan för förklaring. Denna kan, förutom på avvägda höjder, användas även på mätning av vertikalvinkel och längd om trigonometriska höjder ska användas. Vikter för höjder räknas för avvägningar automatiskt ut genom formeln P= k / L där L är längden mellan punkterna i km. k är en konstant som sätts till ett om bara ett instrument använts. Om flera instrument använts så sätts k för mätningar med det bästa instrumentet till ett och för de andra till ett delat med hur många gånger sämre mätningens instrument är jämfört med det bästa instrumentet (uträknat från instrumentens apriorimedelfel).
Använd mätn. Under denna flik finns ett antal olika val och alla anger vilken/vilka mätningar på den aktuella raden som ska vara med i beräkningarna:
Ingen Ingen mätning används från denna rad.
Hor. Vinkel Endast den horisontella vinkeln används.
Längd Endast längden används.
Hv + Längd Den horisontella vinkeln samt längden används från denna rad. Det vill säga inga höjddata.
Höjd Höjdobservationer används, det vill säga den vertikala delen av en lutande längd eller en avvägd höjdskillnad.
Hv + Höjd Horisontalvinkel och höjd används men alltså inte den horisontella delen av längden om en sådan är mätt.
HV + L + Höjd Horisontalvinkel, längd och höjdmätningar används.
Längd + Höjd Längd och höjd används men alltså inte den horisontella vinkeln.
Bäring Endast bäringen används.
Punkter
Kända punkter
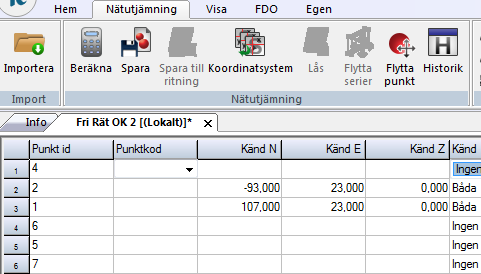
Under fliken punkter ser vi alla punkter (kända och nya) som ingår i utjämningen. Kända koordinater hämtas automatiskt från aktuell polygonpunktsfil när vi importerar en mätdatafil eller knappar in mätdata direkt i nätutjämningen. Både stations- (från) och objekts- (till) punkt kontrolleras.
Det går även bra att manuellt ändra koordinater på en känd punkt samt att ändra punkter från kända till nypunkter om man önskar att dessa ska beräknas i utjämningen och inte användas som fasta punkter (t ex om man anar att de kända koordinaterna är fel). De kända koordinaterna finns kvar om man vill låsa punkten igen. En nypunkt kan göras känd genom att knappa in koordinaterna i kolumnerna Känd N, E eller Z och ändra inställningen i kolumnen Känd, där det också går att ange att en punkt är känd i plan men inte i höjd eller vice versa. Om koordinater för en punkt är beräknade så går det att låsa dem genom att som nämnts ändra i kolumnen Känd. De beräknade koordinaterna kopieras då till kolumnerna för kända koordinater, förutsatt att dessa kolumner är tomma i den aktuella raden.
Förutom koordinaterna finns kolumner för centreringsfel N, E och Z. Här kan man ange ett centreringsfel som man vet gäller för punkten oavsett instrument. Om vi har blanka rutor här, så kommer de värden vi angivit för centreringsfel under Instrument att gälla. Vid en vanlig stativuppställning är 3mm ett normalt fel, men om vi använder t ex väggprismor är det lägre. En fri stationspunkt har alltid centreringsfelet 0, men dess koordinater brukar inte vara intressanta i slutresultatet.
Vi kan också använda centreringsfelet om vi som kända punkter använder beräknade punkter från en gammal utjämning. I vanliga fall antas ju alla kända punkter ha lika stor noggrannhet, men genom att använda punktmedelfelen från den gamla utjämningen kan vi ge mätningar mot sämre kända punkter lite större spelrum. Därmed kommer osäkerheten från dessa punkter (med större medelfel från den gamla utjämningen) att påverka vår nya utjämning mindre.
Efter genomförd beräkning ser vi Beräknat N, E och Z, samt Standardosäkerhet (medelfel) N, E och Z för punkterna, som talar om beräknat läge för nypunkterna, samt vilken precision de har. För närmare förklaring till dessa rubriker, se Rapport.


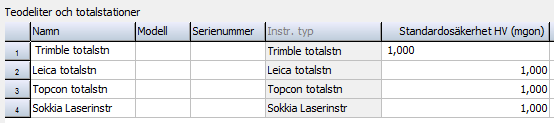
Instrument
Instrument
Under instrument kommer en lista upp med de instrument som är valts vid import av en eller flera mätdatafiler. Instrumenttypen kan sedan väljas för varje mätning under fliken Mätningar i kolumnen Instrument. Data om instrumenten kan hämtas från respektive leverantör. Det är bl a ur dessa värden som vikterna beräknas, vilket gör att en mätning med ett bra instrument kommer att påverka resultatet mer än mätningar med ett sämre instrument. Värdena som man matar in är instrumentets fabrikstestade apriori-medelfel (se Rapport).
Generellt kan sägas att framför allt grundmedelfelet påverkas direkt av instrumentdata, då det är en jämförelse med instrumentets kapacitet (1,000 för planberäkningar innebär att man mätt precis i nivå med vad instrumentet klarar). P g a detta kan grund- och mätningsmedelfel samt sigmanivåer variera beroende på vilka instrumentdata vi väljer. I övrigt påverkar instrumentdata hur olika mätningar viktas jämfört med varandra, dvs hur mycket de påverkar resultatet. OBS! Det är alltså av högsta vikt att vi har angett korrekta värden för instrumentets data om vi vill ha tillförlitliga bedömningar av nätets kvalitet! Observera att du inte får ange något värde till 0.0000 då detta är ett orimligt värde som skulle gälla ett helt felfritt instrument, vilket gör att vikterna inte går att beräkna.

- Inställningar:
Namn Angivet namn för instrumetet
Instr.typ Olika fabrikat av instrument hanterar korrektioner för tryck och temperatur olika, vilket tas hänsyn till under denna inställning. Se även Atm. korr i kapitlet Mätningar.
HV Standardosäkerhet Horisontalvinkelnoggrannhet. Anges i mgon (omställbart till gon eller grader)
VV Standardosäkerhet Vertikalvinkelnoggrannhet. Anges i mgon (omställbart till gon eller grader)
Längd Standardosäkerhet Konstant del. Anges i millimeter (omställbart till meter)
Längd PPM Avståndsberoende del. Anges i PPM
Centreringsfel i plan Ett centreringsfel kan antingen anges för respektive punkt eller generellt för från- och tillpunkter där instrumentet använts. Centrerings-felet kommer att ge alla mätningar som gjorts med instrumentet ett tillägg i noggrannheterna som angetts ovan. T ex kommer längdnoggrannheten att räknas som något sämre beroende på den påverkan som centreringsfelen ger. Om ett fält är blankt i kolumnerna Centreringsfel X och Y under fliken Punkter så kommer det centreringsfel om angivits för instrumentet att användas.
Höjdavläsningsfel Trig-höjd: mätfelet vid mätning av instrument- och signalhöjd. Avvägning: graderingsfel på stången (oftast 0)
Beräkning av nät
Beräkning
För att beräkna ett nät går vi till Nätutjämning|Beräkning, alternativt så klickar vi på någon av flikarna Grafik, Resultat eller Rapport. Om någon ändring har skett av indata eller om vi gör vår första beräkning så står det ”Nätutjämningen har ändrats, vill du beräkna nätet?” under dessa flikar, och då svarar du ja.
- Observera att de snabbval som är gjorda i System- eller Projektinställningar gäller. Vill du använda egna inställningar för atmosfärs-, ellipsoid- och/eller projektionskorrektion måste snabbvalet anges till ”Egna inställningar”.
Beräkningen sker direkt och du kan gå till flikarna Summering, Grafik, Resultat eller Rapport för att se resultatet.
Flytta mätserier eller punkter
Nätutj.|Flytta mätserier / punkt
För att få mätserier i en önskvärd ordning så markerar man en rad i den serie som ska flyttas i mätdatafliken. Efter att ha valt Nätutj | Flytta mätserier så dyker följande fönster upp:
Knapparna i fönstret har följande funktioner (beskrivna från vänster till höger): Flytta mätserien till mätdataflikens början, fem serier uppåt, ett steg uppåt, ett steg neråt, fem steg neråt och slutligen till tabellens slut.
Under punktfliken kan samma sak göras för en vald punkt.
Visa Skärminställningar
Visa
- Inställningar
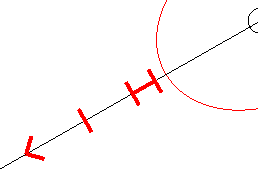
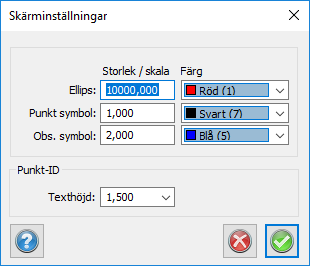
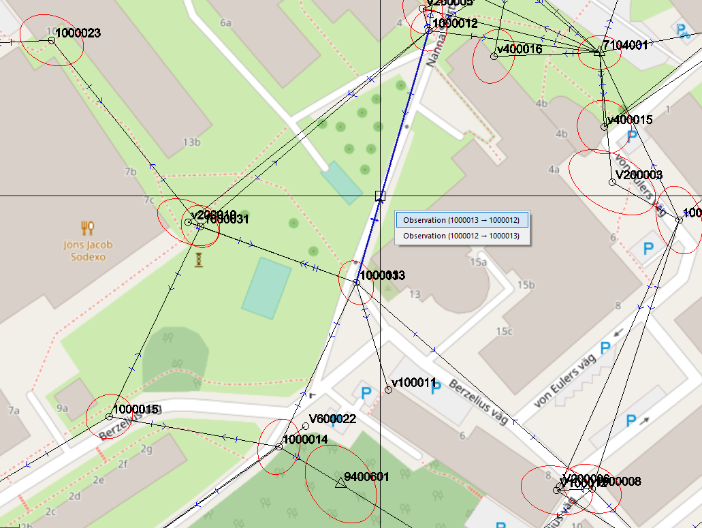
För att underlätta visningen av nätet kan man ändra färg och skala för punktsymboler, felellipser och observationssymboler. Det går också att ändra värdet för punktbeteckningens storlek. Symbolerna som används för punkter är trianglar för kända punkter i plan, cirklar för nypunkter och trianglar med ett plus i en cirkel för kända punkter i både plan och höjd. Observationer visas med raka tvärstreck för mätt längd, pilar för mätta vinklar, samt ett dubbelt förbundet tvärstreck för höjdskillnader (se figur nedan till vänster). Ändringen genomförs genom att välja Visa|Inställningar.
Om ellipserna hade samma skala som nätet i sig, skulle de ju inte synas. I stället kan man här sätta den skalfaktor de ska förstoras med jämfört med nätet.
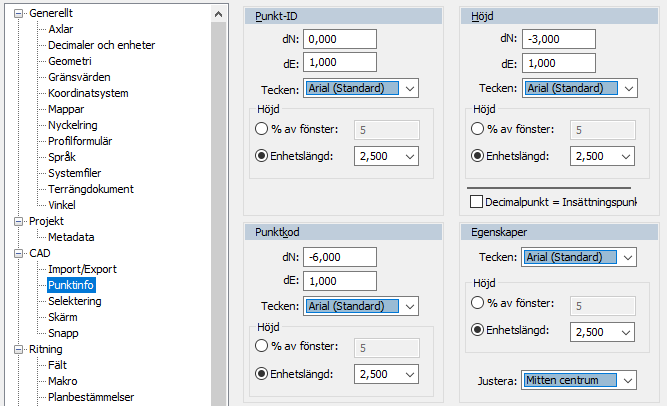
För Punktbeteckningar kan man ändra font och textplacering genom att gå till Hem/Systeminställningar och välja fliken Punktinfo. I rutan PunktID kan man ändra placering, typsnitt och storlek på punktbeteckningarna.
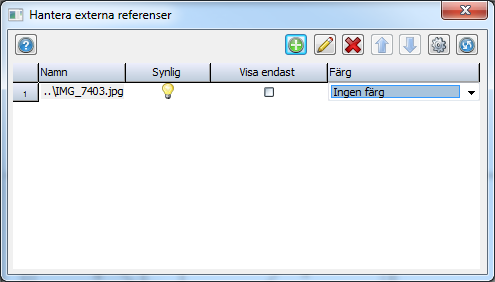
- Externreferens (Xref)
Möjlighet att välja en georefererad ritning, shapefil, flygbild, eller karta som bakgrund.
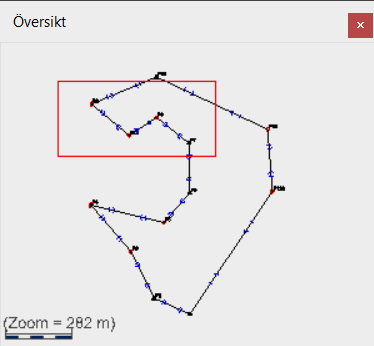
- Översikt
Visning / avstängning av översiktsvy med ram som visar aktuellt zoomläge.
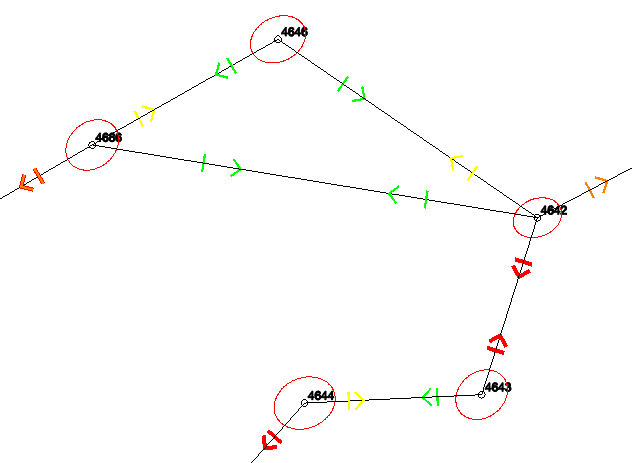
- Standardiserade residualer och Individuella k-tal
För observationssymboler går det att använda olika färger för att via kvalitén på sigmanivåer eller relativa redundanser. Detta kan vara bra för att få en överblick över nätet och se grafiskt var man har grova fel eller dåligt kontrollerade mätningar. Mätningarna färgas då röda om de är över toleransen, gula/orangea om de bör kontrolleras och gröna om de är godkända. Dessa färgkoder kan väljas genom att klicka på symbolen ![]() för sigmanivåer och
för sigmanivåer och  för relativa redundanser. Om dessa symboler inte valts kommer istället den färg som valts i skärminställningar att användas. I följande figur visas hur symbolernas färger illustrerar olika sigmanivåer.
för relativa redundanser. Om dessa symboler inte valts kommer istället den färg som valts i skärminställningar att användas. I följande figur visas hur symbolernas färger illustrerar olika sigmanivåer.
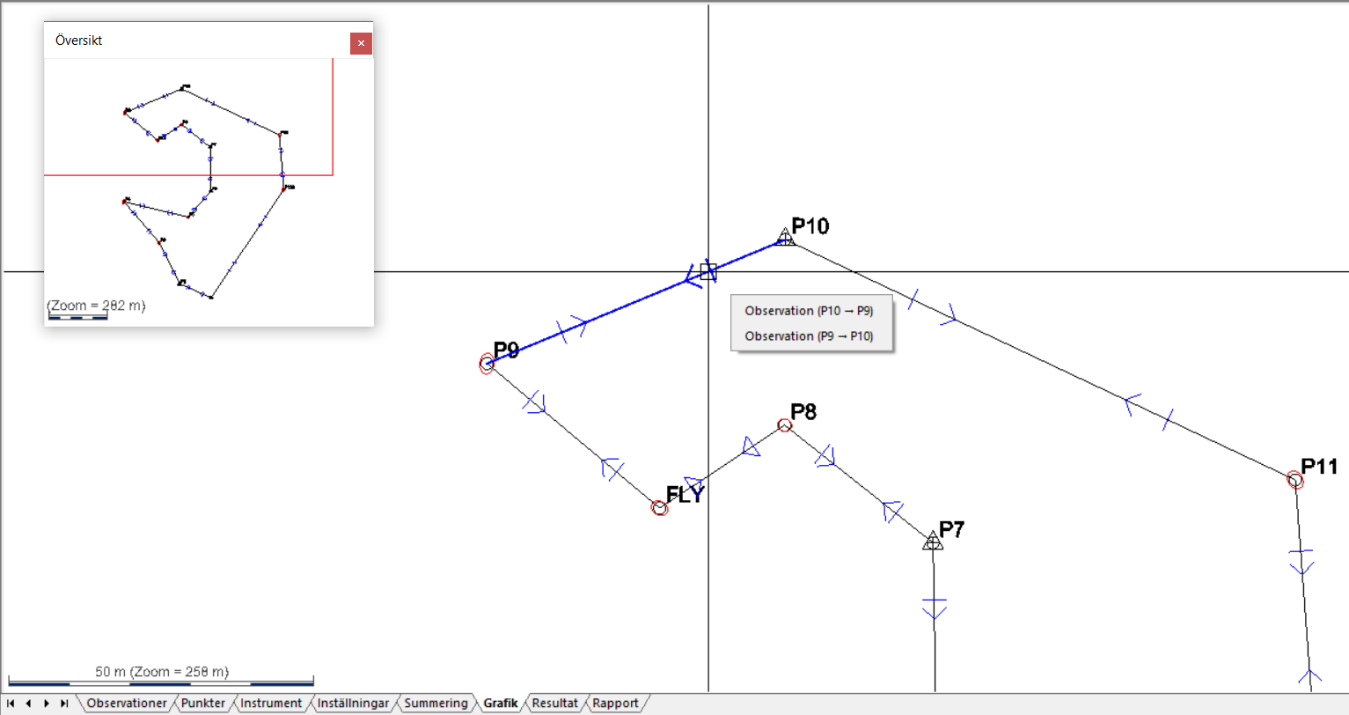
Grafik
Grafik
- Stöd för att växla mellan grafik och tabelldata (mätningar och punkter) genom att dubbelklicka på punkter i grafiken.
- Stöd för att växla mellan grafik och tabellflikar genom att dubbelklicka på observationer i grafiken.
- Punkter och observationer markeras när man flyttar musen över dem.
- Avaktiverade mätningar finns kvar som observationssymboler men ändrar färg till ljusgrått så man kan klicka på dem för redigering.
Tester
I denna meny finns ett antal tester för att se om våra mätdata eller kända punkter innehåller grova fel. De angivna testerna följer beskrivningarna i HMK Geodesi Stommätning.

- Grova fel
Sökning av grova fel möjliggör en snabb kontroll av observationerna i nätet. Genom att aktivera kommandot Tester|Grova fel så zoomar programmet automatiskt in på det största felet i nätet, det vill säga den observation (längd eller vinkel) som har den största kvoten. Denna beräknas enligt HMK:s definition som den s k standardiserade förbättringen (sigma-nivån), vilken är mätningens förbättring delat med mätningens apriorimedelfel. Man kan för varje observation bestämma om man ska redigera observationen, behålla eller radera (ta bort) den. Radering innebär dock enbart att mätningen avaktiveras. Klickar vi på Nästa så visas det näst högsta felet osv. Vill man gå tillbaks (mot större fel) så klickar man på Föregående.
Anges Redigera så hoppar programmet till observationsfliken och markerar den aktuella observationen. Det är sedan möjligt att redigera och gå tillbaks till grafiken, då ges frågan om nätet ska räknas om.
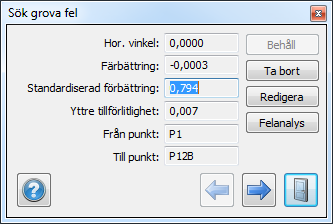
- Felanalys (finns att välja inom fönstret för sökning av Grova fel)
Om en mätning är på gränsen till att vara ett grovt fel kan det vara bra att bedöma den på fler sätt än bara genom sigmanivå och förbättring. I funktionen Felanalys testas en utvald mätning på ett antal olika sätt för att bättre kunna bedöma om mätningen ska uteslutas eller få vara kvar i nätet. Funktionen aktiveras genom att använda den tidigare beskrivna funktionen Grova fel, och sedan stega sig fram till den aktuella mätningen med Föregående och Nästa-knapparna. Därefter trycker man på knappen Felanalys. En rapport visas då som innehåller följande:
- En summering av en utjämning med mätningen passiv och en utjämning med mätningen aktiv.
- Hur mycket avstånd och bäring mellan de båda punkterna som mätningen gäller förändras efter en utjämning om mätningen ändras från aktiv till passiv.
- De tio största förändringarna av nypunkternas koordinater i nätet efter en utjämning om mätningen ändras från aktiv till passiv. Via denna test ser man hur mycket punkterna i nätet verkligen påverkas av den aktuella mätningen.
- Utjämningsresultaten för de kringliggande mätningar som antingen är mätta från eller till någon av de två punkter som den testade mätningen gäller. Dessa utjämningsresultat visas i två varianter; med mätningen aktiv samt passiv i nätet.
- Mätningens förbättring i en s.k. ”grovfelsutjämning”. Denna utjämningstyp arbetar enligt principen ”om den aktuella mätningen ses som orsak till, och tar på sig så stor del som möjligt av kringliggande mätningars fel, hur stort är då felet?”
- Grovfelsökning (med nedviktning)
Om man har en mätning med ett grovt fel i ett nät så kommer mätningens fel dels att påverka de beräknade koordinaterna och dels ”smeta ut sig” som mätfel på kringliggande korrekta mätningar. Det innebär också att den dåliga mätningens förbättring inte visar hela felet – en del av det har ju fördelats på kringliggande mätningar. Om man granskar en lista med grova fel från en utjämning är det alltså inte alls säkert att alla mätningar som har höga sigmanivåer är grova fel – de flesta har fått sina fel från enstaka grova felmätningar vars fel ”smetat ut” sig.
Denna funktion, ”grovfelsökning med nedviktning”, producerar en lista som strävar efter att bara visar de mätningar som har grova fel, och dessa fels verkliga storlek. Denna lista är oftast en bättre utgångspunkt inför sökandet av grova fel och ommätningar än en vanlig utjämningsrapport.
Funktionen sätter igång en automatisk process där programmet först genomför en utjämning och letar upp den mätning som har den största sigmanivån. Om ingen mätning har en nivå över 3 så avbryts testet då ju alla mätningar är godkända. Om värdet är över 3 så ändras den förväntade standardosäkerheten, även kallad apriori- (det förväntade) medelfelet för denna mätning så att sigmanivån blir precis under 3. Den nya sigmanivån innebär att mätningen precis klarar gränsen för grovt fel med sitt nya apriorivärde, då vi nu sänkt våra förväntningar på mätningens precision inför nästa beräkning.
Efter detta sker automatiskt en ny utjämning, där det nya apriorimedelfelet ger mätningen en lägre vikt än tidigare. Den behåller då oftast mer av sitt fel eftersom den lägre vikten gör att den påverkar både koordinater och de kringliggande mätningarna mindre. Den större förbättringen som detta resulterar i gör att den kanske även denna gång har störst sigmanivå. Den viktas då ner ännu mer genom att justera apriorimedelfelet mot den nya förbättringen. Om någon annan mätning har störst sigmanivå så är det istället den som ändras. Beräkningen fortsätter med att vikta ner, utjämna och söka största sigmanivån tills alla mätningar ligger under 3. En kontroll genomförs sedan av alla justerade mätningar för att se att de inte viktats ner för mycket. Detta kontrolleras genom att undersöka att de inte har en sigmanivå under 2.9, i så fall viktas de upp igen och nya utjämningar sker tills alla justerade mätningar ligger mellan 2.9 och 3.0. Dessa justerade mätningar har nu viktats ner så att de i stor utsträckning behåller sina fel som då inte påverkar sin omgivning lika mycket. I rapporten som följer redovisas sedan de mätningar som viktats om med data från både första och sista utjämningen.
Vid praktiska tester har metoden visat sig vara betydligt bättre på att hitta grova fel och dessutom bestämma deras verkliga storlek än om man endast använder sig av kontroll av sigmanivåer efter en utjämning. Funktionen är en variant som liknar det som inom felteorin kallas ”robust estimenting – den danska metoden”.
Förklaring till rapport
Från Frånpunkt
Till Tillpunkt
Rad Radnummer
Mättyp L, HV, dH, FI
Mätn. (korr) Mätningen med pålagd korrektion men ej förbättring
Korrektion Atmosfärs-, ellipsoid- och projektionskorrektion
Orig förb Förbättring efter första utjämningen
Slutl förb Slutlig förbättring efter att mätningen viktats ner. Detta är det mest intressanta testresultatet, då det är en uppskattning av
det verkliga felet, dvs när hela felet har stannat kvar hos mätningen.
Orig osäkerh. Ursprunglig förväntad standardosäkerhet (apriorimedelfel) för mätningen
Slutl osäkerh. Slutlig standardosäkerhet för mätningen efter nedviktning(ar)
Orig. std. förbättr. Standardiserad förbättring (sigmanivå) efter första utjämningen
Slutl. std. förbättr. Standardiserad förbättring uträknad ur slutlig förbättring och ursprunglig standardiserad förbättring
Viktfaktor Kvot mellan slutlig och nerviktad standardiserad förbättring, visar hur mycket mätningen viktats ner
Orig. k-tal Relativ redundans (individuellt k-tal) efter första utjämningen
Slutl. K-tal Relativ redundans efter nerviktning(ar), anger hur stor del av felet som stannat kvar på mätningen
Iterationer Antal nerviktningar med påföljande utjämning för att få mätningen att stanna under standardiserad förbättring 3.0
- Kontroll av bortvalda mätningar
Denna funktion genomför först en utjämning med inställda parametrar och listar en summering av utjämningen med bl. a. grundmedelfelet. Sedan sätts den första bortvalda mätningen som aktiv och en ny utjämning genomförs. Denna redovisas med resultat för den aktuella mätningen och en summering av utjämningen. Därefter kopplas den bort igen, varpå nästa uteslutna mätning läggs till. Denna utjämnas, redovisas och plockas sedan bort. Processen upprepas automatiskt för alla uteslutna mätningar. I den slutliga rapport som skapas kan man sedan se hur varje utesluten mätning påverkar nätet, och då få bekräftat att alla uteslutna mätningar verkligen försämrar nätet.
I vissa fall kan godkända mätningar felaktigt ha plockats bort då man felsöker ett nät, men i denna rapport får man alltså reda på om det finns mätningar som egentligen borde vara aktiva. Då bortvalda mätningar ofta innebär kostsam ommätning, kan man med denna rapport redovisa att alla bortvalda mätningar är felaktiga.
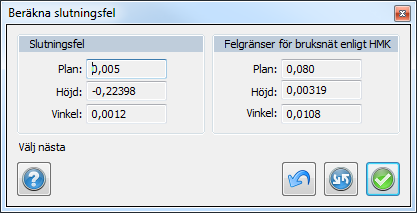
- Slutningsfel
Denna kontroll är manuell och kan användas för grovfelsökning genom att ”gå” tåg i nätet. Klicka först någonstans på skärmen så att en kvadrat bildas. Genom att markera punkt för punkt och sedan komma tillbaks till utgångspunkten beräknas slutningsfelet för slingan. Denna process ger en säker och snabb kontroll av delar av nätet och genom att använda flera olika slingor kan man snabbt hitta var eventuella fel ligger.
Felgränser (från gränsvärdesfilen) visas också för alla mätningstyper om man gör en slingkontroll i grafiken.
Ångra tar bort senaste tillagda punkt, Börja om rensar memorerade punkter.
- Flermätta längder
Denna testmetod söker upp alla längder som är mätta åt bägge hållen och jämför dem med varandra. Differensen kontrolleras sedan mot ett gränsvärde som angivits i System/Projektinställningar. Programmet kommer direkt att skapa en färdig rapport med de testade längderna.
- Flermätta höjdskillnader
Denna testmetod söker upp alla höjdskillnader som är mätta åt bägge hållen och jämför dem med varandra. Differensen kontrolleras sedan mot ett gränsvärde som angivits i System/Projektinställningar. Programmet kommer direkt att skapa en färdig rapport med de testade höjdskillnaderna.
- Slutningsfel (mellan kända höjder)
Denna testmetod beräknar automatiskt höjdtåg mellan kända höjder som programmet kan hitta i nätet. Den sammanlagda höjdskillnaden för mätningarna jämförs med höjdskillnaden mellan de kända höjderna. En rapport skapas där också en jämförelse med ett gränsvärde genomförs.
- Kontroll av höjder (automatisk test av höjdslingor)
Programmet beräknar automatiskt alla separata höjdslingor som går att skapa i nätet. Slutningsfelen jämförs med gränsvärden och skrivs ut i en rapport.
- Efterkontroll av höjder
Denna testmetod jämför det utjämnade höjderna med de mätningar som ingick i utjämningen. Jämförelse sker mot gränsvärde och skrivs ut i en rapport.
- Punktnumrering
Testmetoden undersöker om några punkter har snarlika koordinater, vilket kan vara ett tecken på att det egentligen är olika namn på samma punkt. Snarlika punktkoordinater redovisas jämfört med ett gränsvärde i en rapport. Metoden förutsätter att en beräkning har genomförts. Om inga närliggande punkter hittas visas meddelandet Inga punkter funna.
- Mätningar (plan)
Testet kontrollerar om några stationer har färre än fyra objekt (ej önskvärt t ex i Banverkets fackverkståg), punkter där vinkelmätning ej utförts, antal stationsuppställningar per punkt samt längder som endast mätts åt ett håll. Resultatet listas i en rapport.
- Ej dubbelmätta höjder
Testet kontrollerar höjdskillnader ej dubbelmätts och listar dem i så fall.
- Kända punkter
Om vi genomfört en tvångsutjämning (utjämning med kända punkter låsta) och fått flera mätningar utpekade som felaktiga, så behöver det inte alltid bero på att det är fel på mätningarna. Det kan istället vara de kända punkterna som har felaktiga lägen. Detta kan bero på att de har rört sig, att man har använt fel punkt eller att vi har angett fel koordinater. I utjämningen räknas alla kända punkter som perfekta och eventuella fel hos dem tolkas som mätningsfel istället.
För att testa mätningarna utan påverkan från koordinatfel bör man därför genomföra en fri utjämning (alla punkter räknas som nya) för att få bort alla fel i mätningarna. Detta förutsätter att nätet i så stor utsträckning som möjligt hänger ihop i slingor – polygontåg mot anslutningspunkter ger ett osäkert resultat vid fri utjämning.
Om man fått bort alla mätfel i nätet så återstår att testa de kända punkternas lägen. Detta görs genom följande steg:
- Om man under Nätutj.|Inställningar|Generell valt Plan eller Plan och höjd så testas kända koordinater i plan. Om valet är Höjd så testas Z-koordinaterna istället.
- Testet startas genom att välja Tester|Kända punkter. Följande fönster dyker upp:

- Här väljer vi först vilka punkter som vi vill testa i listan Lås/frikoppla kända punkter. De punkter som är förbockade kommer att ingå i testet. Klickar vi på knappen Alla så kommer alla punkter att ingå. Knappen Ingen kopplar bort alla så att man sedan själv kan göra ett urval. På detta vis så har vi möjlighet att bara testa kända punkter i en viss del av nätet, vilket kan vara användbart i långsträckta nät.
- Programmet kan sedan ställas in för att stanna när en beräkning har skett (Frikoppla endast punkt med störst fel) eller frikoppla sämsta punkten och räkna om tills alla punkter klarar gränsvärdet (Frikoppla punkter tills nätet är godkänt). Det sistnämnda är snabbt och smidigt som ett första test, men den slutliga kontrollen bör helst göras punkt för punkt där man gör en noggrann analys innan man går vidare.
- När programmet beräknar längdmätningar så kan man ange under Korrektioner om längder ska korrigeras för Ellipsoid och Projektion. Om man väljer Enligt dokumentets koordinatsystem så gäller de korrektioner som är inställda generellt för projektet. Inställningarna kan kontrolleras under System/Projektinställningar|Koordinatsystem. Väljer man Enligt lokalt koordinatsystem så avaktiveras korrektionerna för Projektion och Ellipsoid. Observera att dessa val gäller oavsett vad man ställt in som snabbval under Nätutj.|Inställningar|Metod.
- Om Inkludera punkternas standardosäkerhet från den fria utjämningen i testkvoter är ikryssad så tas även punktosäkerheten från den fria utjämningen med när testkvoten beräknas. I HMKs beskrivning är denna ej med (ej ibockad ruta som default), men felteoretiskt borde osäkerheten i det fria nätet tas med i bedömningen, så det är upp till användaren att bestämma..
- Test av kända punkter har utvecklats för att följa metodbeskrivningar och krav i nya HMK2020, och har bl.a. med värden för att bedöma om en skalskillnad är signifikant utan att behöva använda externa transformationsfunktioner.
För att beskriva övriga inställningar så går vi igenom vad som händer om man startar testet genom att trycka på Beräkna:
- En fri utjämning genomförs. För de punkter som ska testas så plockas de koordinater ut som punkterna fick i den fria utjämningen. Dessa är felaktiga i och med att de kommer från en fri utjämning, men om denna är korrekt så ligger punkterna rätt relativt varandra.
- Programmet tar sedan testpunkternas koordinater från den fria utjämningen och transformerar dem för att passa in dem så bra som möjligt på de kända koordinaterna för samma punkter.
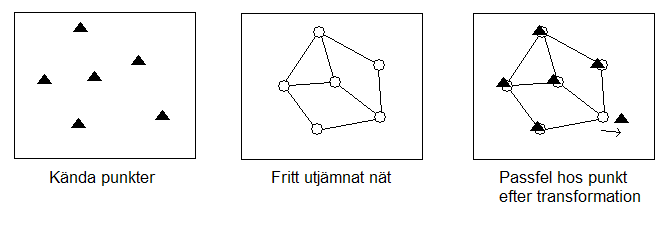
- Detta görs för test i plan genom förflyttning i X och Y, vridning och, om man valt det i programmet, skaländring. Detta val sker genom att välja Kongruent eller Helmert som Transformation. Den sistnämnda typen anpassar även det fria nätets skala, vilket gör att man tar bort påverkan av skalfel hos längdmätaren. Om man är säker på att längdernas skala är riktig så bör man använda Kongruent, som behåller längdernas skala. Det finns annars en liten risk att passfel hos punkter delvis tolkas som skalfel istället i beräkningen.
- I höjd sker transformationen genom att programmet beräknar medelvärden för både de kända och de utjämnade punkterna. Medelvärdet räknas sedan bort från kända respektive utjämnade koordinater så att bägges snitt blir noll (tyngdpunktsreducering).
- För höjder räknas det även ut medelfel för anslutningshöjdfixar även om de inte ingår i den fria utjämningen. Programmet letar då upp närmaste utjämnade höjd och använder medelfelets fortplantningslag på medelfelen för anslutningsmätningarna och den närmaste utjämnade punkten för att sätta ett medelfel för den höjdfix som man anslutit till. Detta värde har givetvis inte samma säkerhet som de höjdmedelfel som ingår i den fria utjämningen. Att utesluta dem skulle dock innebära att man inte fick med anslutnings-höjdfixarna alls i testet, vilket oftast är en större nackdel då denna mätsituation förekommer ganska ofta.
- I plan testas endast de kända punkter som ingått i den fria utjämningen, dvs anslutningspunkter utesluts ur testet om inte mätningarna är överbestämda mot dem. Detta beror på att de är osäkra jämfört med det övriga nätet, då minst två okontrollerade mätningar (vinkel och längd) används. Det är dock vanligt i plan att anslutningsmätningarna är överbestämda så att punkterna ingår i det fria nätet. Vi har även situationer när bara en vinkel är mätt mot en känd punkt som är bakåtobjekt. Denna punkt blir i så fall omöjlig att testa och utesluts ur testet.
- Om de kända koordinaterna är korrekta (och även mätningarna i den fria utjämningen) så ska utjämnade och kända koordinater passa exakt på varandra vid en transformation. Om någon punkt är felaktig så märks det genom att den får ett passfel mellan fria och kända koordinater. Passfelet redovisas som fel uppdelat i X och Y samt radiellt (totalt) fel. Problemet är nu bara var man ska dra gränsen för när en punkt är felaktig, och i samband med detta ta hänsyn till de felkällor som finns i beräkningen. Dessa är främst punkternas medelfel från transformationen och den fria utjämningen. En punkt som ligger i utkanten av nätet blir t ex mer osäker i transformationen än en i mitten.
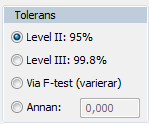
- För att få ett så säkert redskap som möjligt för att konstatera fel, så räknas en testkvot fram. Denna anger hur stort passfelet är jämfört med punktens sammanlagda medelfel från transformationen och den fria utjämningen i passfelets riktning. Detta testvärde kan jämföras med standardiserade förbättringar (sigmanivåer) för mätningar. Efter detta så kan HMK:s trenivåprincip tillämpas för att bedöma om en punkt är fel eller ej. Man kan ställa in i programmet om gränsen för fel ska dras vid faktorn 2 (95% sannolikhet för fel), 3 (99.8%), F-test (varierande gränsvärde) eller en egen nivå.
- När beräkningen är klar så redovisas hur många punkter som är låsta respektive frikopplade efter beräkningen. I rutan Aktuell punkt visas sämsta punktens ID och testkvot tillsammans med felet i X och Y, radiellt (totalt) och i vilken riktning (bäring) som punkten har rört sig.
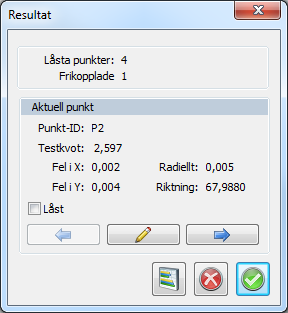
- Klickar man på Redigera så hoppar programmet till punktfliken och ställer sig på den aktuella punktens rad. Detta är till för att snabbt kunna kontrollera och eventuellt korrigera felaktiga koordinater för den aktuella punkten. Klickar man på Nästa så visas näst sämsta punkt och så vidare. Föreg. går sedan åt andra hållet.
- Vi kan också bocka för om punkten ska vara känd (Låst) eller frikopplad i nästa beräkning.
- För att få en sammanställning av en beräkning så klickar man på Rapport. Man väljer då vilken rapportmall som man vill använda (vanligtvis Standard) och får då upp en sammanställning av beräkningen. Rapporten visar först följande uppgifter:
Filnamn |
Namn på nätutjämningsfilen |
Koordinatsystem |
Valt system anges |
|
Transformationstyp |
Helmert (skaländring) eller Kongruent (ej skaländring) |
|
Antal kända punkter |
Antalet kända punkter överhuvudtaget i nätet |
|
Antal kända punkter som testats |
Antalet kända punkter som ingått som låsta i testet |
|
Antal frikopplade punkter |
Antalet punkter som kopplats fria före eller under testet |
|
Antal kvarvarande låsta punkter |
Antalet punkter som är låsta efter testet |
|
Antal kvarvarande låsta punkter som testats |
Antalet punkter som är låsta efter testet och som ingått i detta |
|
Antal nypunkter |
Antalet beräknade nypunkter i nätet |
T-gränsvärde för punkternas testkvoter |
Det gränsvärde som definierar om en punkt är felaktig (t-värdet för en punkt är en kvot mellan punktens passfel och medelfel) |
- Sedan visas grundmedelfel, HMK:s godkäntgräns, överbestämningar och k-tal för den fria utjämning som ligger till grund för testet. Efter detta redovisas samma parametrar för en tvångsutjämning med alla punkter låsta och slutligen en tvångsutjämning med endast kvarvarande låsta punkter som kända. Tanken här är att man ska kunna se om de borttagna punkterna förbättrar nätet som helhet vid den sista utjämningen.
- Efter detta visas data för den/de punkter som kopplats bort. Följande data visas:
Punkt ID |
Punktens namn |
|
dN (passfel) |
Passfel i N-led |
|
dE (passfel) |
Passfel i E-led |
|
dR (passfel) |
Radiellt (totalt) passfel |
|
Std. osäkerh. transf. |
Standardosäkerhet (medelfel) från transformationen för punkten i passfelets riktning |
|
Std. osäkerh. Fri utj. |
Medelfel från den fria utjämningen för punkten i passfelets riktning |
|
Std. osäkerh total |
Sammanlagt medelfel för punkten i passfelets riktning |
|
|
|
|
Ändring N |
Ett mått på hur mycket punkten har flyttat sig i N-led vid utjämning efter att de felaktiga punkterna kopplats fria |
|
Ändring N |
Som ovan men i N-led |
|
Avstånd känd |
Avståndet från den aktuella punkten till närmaste kända som ingår som känd i utjämningen och inte har blivit frikopplad. Om det är långt till en känd punkt så kommer den ovan beskrivna ändringen att bli större. |
|
Ändring ppm |
Jämförelse i mm/km mellan den den radiella (totala) ändringen och avståndet till närmaste kvarvarande kända punkt. Punkter som ligger nära en känd punkt och som har rört sig mycket är en större felkälla än de som har samma ändring men långt till närmaste kända punkt. Ett högt ppm-tal tyder alltså på att punkten är osäker och påverkar nätet mycket. |
- Nästa del av rapporten är en redovisning av varje enskild sökning och dess resultat. Om vi har ställt in programmet på att bara göra en beräkning så visas den här. Har vi valt ”Frikoppla punkter tills nätet är godkänt” så redovisas alla separata beräkningar. Följande data ingår:
SökningAntal kända |
Iterationsnummer, sökningsnummer i ordningen Antalet kända punkter överhuvudtaget i nätet |
|
Antal frikopplade |
Antalet punkter som kopplats fria före testet |
|
Antal låsta |
Antalet punkter som är låsta före testet |
|
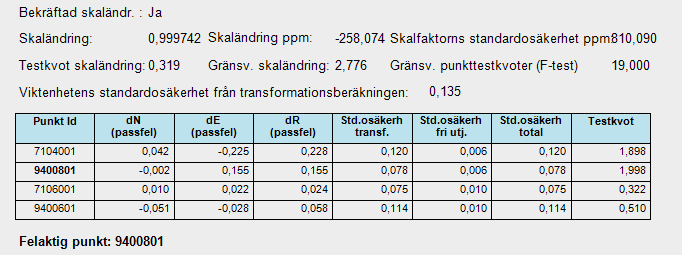
Bekräftad skaländring |
|
|
Skaländring |
Den skalfaktor som beräknats vid transformationen mellan de fria och kända punkterna. Har vi använt kongruent transformation så blir skalan 1.000000. Om vi valt Helmert så tyder större avvikelser från ett på att vid har ett skalfel hos längderna. |
|
Skaländring ppm |
Skaländringen jämfört med ett uttryckt i ppm |
|
Skalfaktorns standard- osäkerhet |
Skalfaktorns beräknade standardosäkerhet |
|
Testkvot skaländring |
Kvot mellan skaländringen och dess standardosäkerhet |
|
Gränsv. skaländring |
Gränsvärde för skaländringens testkvot |
|
Gränsv. Punkttestkvoter (F-test) |
Gränsvärde för F-test av enskilda punkters passfel (om de har en signifikant rörelse) |
|
Viktsenh. std. osäkerh. från transformationen |
Viktsenhetens standardosäkerhet (grundmedelfelet) från transformatioinsberäkningen |
- Sedan visas för varje test följande tabell:
Punkt ID |
Punktens namn |
|
dN (passfel) |
Passfel i N-led |
|
dE (passfel) |
Passfel i E-led |
|
dR (passfel) |
Radiellt (totalt) passfel |
|
Std. osäkerh. transf. |
Standardosäkerhet (medelfel) från transformationen för punkten i passfelets riktning |
|
Std. osäkerh. Fri utj. |
Medelfel från den fria utjämningen för punkten i passfelets riktning |
|
Std. osäkerh total |
Sammanlagt medelfel för punkten i passfelets riktning |
- Under tabellen visas slutsatsen:
|
Felaktig punkt eller Testet godkänt |
Resultat från testet. Om en punkt är fel så redovisas den här, plus att den får en stjärna framför sitt ID. |
- När man analyserat klart resultatet så kan man skriva ut eller spara resultatfilen i olika format m h a ikonerna längst uppe till vänster. För att återvända till testinställningarna så stänger man resultatfönstret och väljer OK, varpå man återvänder till testets första fönster. Om punkter har kopplats loss under eller efter senaste beräkningen så är de nu bortkopplade i listan Lås/frikoppla kända punkter. Vi kan nu välja att ändra inställningarna, koppla loss eller låsa punkter och beräkna igen.
- När vi är färdiga med testet så trycker vi på Verkställ. Vi får då en fråga om vi vill att de punkter som kopplades loss i testet ska kopplas loss under punktfliken också. Då det kan vara känsligt att ge kända punkter nya koordinater bör man vara säker på följdverkningarna av detta. Faran är att man lätt får olika koordinater för en viss punkt i olika projekt, så de punkter som kopplas loss bör inte vara osäkra.
Simulering
Simulering
Med denna funktion kan man skapa en konfiguration av mätningar och punkter för att sedan se om nätet blir instabilt någonstans och behöver stagas upp mera (eller alternativt är onödigt bra så att mätningar kan strykas för att spara tid). De mätningar som skapas blir ”perfekta”, vilket gör att vi inte kan studera sigmanivåer och förbättringar. Vi kan däremot se om nätets konfigurarion gör att det är lätt eller svårt att bedöma om en viss mätning har ett grovt fel (Relativ redundans, se Rapport).
- Importera Kända punkter eller Nypunkter
Här kan vi hämta en fil med kända punkter eller approximativa lägen för nypunkter.
- Nya punkter
När denna funktion är aktiverad så kan vi antingen klicka på punktlägen på skärmen eller knappa in koordinater på eventuella nypunkter.
- Mätningar
När denna funktion är aktiverad så kan vi först klicka på knappen Station och sedan på en punkt som vi vill ha som stationspunkt. Den kommer då att markeras med en cirkel runt sig. Vi ser sedan till att klicka i boxar som representerar de mätningar som vi vill skapa (längd, horisontalvinkel osv). Avslutningsvis så klickar vi på de objekt som ska ha mätningar mot sig. Om vi vill byta station klickar vi på ”stationsknappen” och sedan på en ny punkt. Vi kan också ställa in vilket instrument som simuleringen ska använda.
Summering
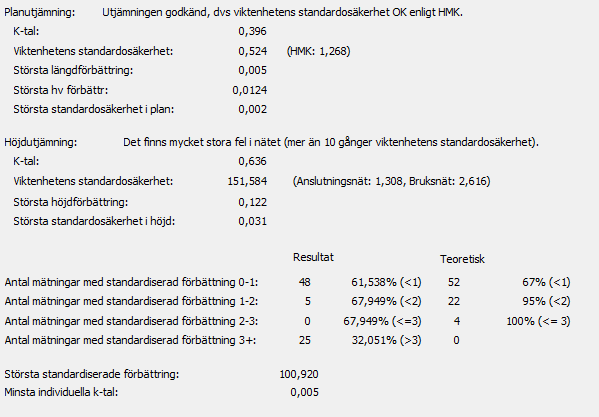
När man genomfört en beräkning så kan man se vilket generellt resultat man har fått genom att välja fliken Summering. Främst anges om beräkningen i plan och/eller höjd har fått ett godkänt grundmedelfel (se Rapport). Om inte, så anges om felet är stort men att beräkning gick att genomföra eller så stort att en utjämning blev omöjlig.
Vi får sedan reda på de viktigaste resultaten som gör att man kan bedöma om utjämningen ska godkännas eller ej för plan respektive höjd. Här ingår nätets grundmedelfel, k-tal, samt största punktmedelfel i plan (felellipsens storaxel) och höjd. Man får även mätningarnas största sigmanivå, förbättring (för vinkel, längd och höjdskillnad) och lägsta relativa redundans (individuellt k-tal). Se beskrivning av dessa parametrar i kapitlet Rapport.
Förutom detta så listas en sammanställning av mätningarnas sigmanivåer så att man ska kunna bedöma om mätningarna innehåller grova fel. Fördelningen av sigmanivåerna jämförs med de teoretiska värden som en ”medelbra” beräkning skulle ge.
Resultat
Under Resultat kan man se resultatet för de mätdata som ingick i utjämningen. För beskrivning av de olika kolumnerna, se Rapport. Om man dubbelklickar på en rad i tabellen med mätningsresultat så hamnar man på mätningens rad i observationsfliken.

Rapportinställningar
Inställningar|Rapportinställningar
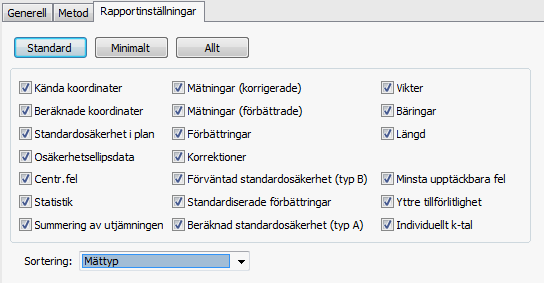
Under fliken Rapportinställningar (i fliken Inställningar) ställer du in vilka delrubriker du vill ha med i rapporten. Du kan när som helst gå in i dessa inställningar för att minska eller utöka rapporten. En ny beräkning är inte nödvändig.
Under Sortering väljer du om du vill ha mätningarna sorterade efter Mättyp (horisontalvinklar för sig, längder för sig osv) eller Station, mättyp som sorterar först efter stationspunkt och sedan efter mättyp.
För information om dessa rubriker se Rapport.
Rapport
Rapporten är uppdelad under ett antal huvudrubriker. Om dessa kommer med och vilka data som finns under rubrikerna beror som nämnts på vilka rapportinställningar man valt. De data som programmet kan ta med i rapporten är följande:
- Totalt
K-tal Anger kontrollerbarhetstalet för plannätet, dvs antalet överbestämningar delat med antalet mätningar. Om man mätt precis det antal mätningar som krävs för att överhuvudtaget få koordinater på punkterna är k-talet 0, men HMK rekommenderar 0.5 och högre för stomnät. För polygonnät är vanliga värden 0.1- 0.2.
Ant. överbestämn. Antalet överbestämningar i plan eller höjd.
Grundmedelfel Storleken på nätets grundmedelfel.
Godkäntgr. fr. HMK Det gränsvärde för grundmedelfel som HMK satt upp för stomnät för att det ska betraktas som godkänt.
Skalfaktor Beräknad skalfaktor i plan vid fri skala. Om sådan inte använts visas värdet 1.000000.
Iterationer Vid planutjämning beräknas hur mycket man måste justera närmevärdena för punktkoordinaterna för att de förbättrade mätningarna ska stämma med dem. Programmet beräknar automatiskt närmevärden genom att använda de vanliga punktbestämningsmetoderna polär inmätning, avskärning etc. Om man har stora fel i nätet blir närmevärdena dåliga och då kommer resultatet inte att stämma riktigt. Man använder då de beräknade koordinaterna som närmevärden och utjämnar igen. Proceduren fortsätter tills mätningarna stämmer med punkterna och antalet beräkningar redovisas som antalet iterationer. 2- 3 är vanliga värden här, och programmet har en maximal gräns på 20 iterationer för att överhuvudtaget kunna genomföra en utjämning. Detta beror på att om mätningarna är tillräckligt dåliga kommer man för varje beräkning att få sämre och sämre värden och därmed aldrig komma fram till ett resultat.
Standardiserad förb, Här anges antalet mätningar som ligger inom de olika sigma-nivåerna (se Sigmanivå). Statistiskt sett bör 68% av mätningarna ligga under nivå ett, 95% under nivå två och 99.8% under nivå tre. Mätningar med sigmanivå över tre klassas som grova fel, men även nivåer mellan två och tre bör kontrolleras enligt HMK.
Ind, k-tal spridning Här anges antalet mätningar som ligger inom olika intervall för individuella k-tal. De intervall som används är följande:
0.00 - 0.10, 0.10 - 0.35, 0.35 - 0.70, 0.70 – 1.00
- Statistik
Antal… Här anges antalet horisontalvinklar, vertikalvinklar, riktningsserier, horisontella längder, lutande längder och kända punkter i plan och höjd. Sedan visas max-, min- och medelvärde för följande värden: standardiserade förbättringar (sigmanivåer), längdförbättringar, horisontalvinkel- och bäringsförbättringar, höjdförbättringar, största påverkan i plan och höjd samt punkters standardosäkerhet i plan och höjd.
- Kända punkter
PunktID Namnet på punkten.
Känd N, E, Z Angivna kända koordinater för punkten.
Centr. fel N, E, Z Angivet centreringsfel för punkten.
- Nypunkter
PunktID Namnet på punkten.
Beräknad X, Y, Z Angivna kända koordinater för punkten.
Std. osäkerhet N, E, Z Beräknat medelfel för punkten inklusive centreringsfel.
Ellips a Felellipsens storaxel, dvs punktens största medelfel i någon riktning.
Ellips b Felellipsens lillaxel, dvs minsta medelfel i någon riktning.
Ellips vink Bäringen för felellipsens storaxel.
Centr. fel N, E Angivet centreringsfel för punkten ifråga.
Höjdavläsningsfel Angivet höjdavläsningsfel för punkten ifråga.
- Mätningar
Från punkt Anger från vilken punkt som man har mätt. Normalt stationspunkten.
Till punkt Till vilken punkt observationen går.
Mättyp Anger längd, horisontalvinkel, bäring eller horisontalvinkel.
Mätvärde (korr) Själva mätningen, observera att längder, vinklar, bäringar och höjder är separerade, samt att längder redovisas som horisontella. Riktningsserier är reducerade till noll för bakåtobjektet. Korrektionen (se nedan) är pålagd.
Korrektion Den sammanlagda korrektionen för atmosfär, projektion och ellipsoid (höjd). Observera att lutningskorrektionen (för att göra en lutande längd horisontell) inte ingår här. Syftet med denna kolumn är att kontrollera att de tre korrektionerna tillsammans blir ett rimligt värde (vanligtvis några cm). Man kan då upptäcka fel i Y-offset eller höjd som resulterar i orimligt stora korrektioner.
Förbättring Hur mycket mätningen måste justeras för att mätningen ska stämma mellan de beräknade och kända punkterna. Ju större värde desto sämre resultat. Dessa värden används främst för att söka grova fel.
Ber. std, osäk. (typ A) Den beräknade standardosäkerheten (aposteriorimedelfelet) för observationen från utjämningen (typ A enligt GUM). Är detta fel större än apriori-medelfelet för observationen har du mätt sämre än vad instrumentet har möjlighet att mäta.
Förv. std, osäk. (typ B) Denna standardosäkerhet är uppmätt i fabriken och beskriver instrumentets förväntade, teoretiska noggrannhet i vinkel, längd och höjd (apriorimedelfelet). För längder är medelfelet varierande beroende på hur lång längden är.
Standardiserad förb. Standardiserad förbättring, sigmanivå (1=felet i nivå med instrumentets prestanda, 2 = dubbelt så stort fel som instrumentets prestanda osv). Detta beräknas genom att ta mätningens förbättring delat med mätningens apriorimedelfel. HMK anger 3 som gränsvärde för att mätningen ska klassas som ett grovt fel.
Minsta upptäckb. fel Minsta upptäckbara fel i mätningen (inre tillförlitlighet), dvs det fel som ger en sigmanivå på precis 3.
Största påverkan Fel som är mindre än minsta upptäckbara fel går ju inte att eliminera. Här anges hur mycket detta fel maximalt påverkar koordinaterna för de punkter den är mätt emellan. Observera att detta värde bara gäller denna mätnings påverkan.
Individuellt k-tal Relativ redundans- hur mycket av felet som stannar kvar hos mätningen i form av förbättringen, (t ex värdet 0.43 innebär 43 % av felet). Om vi har mätt 37 mm fel kommer detta fel delvis att smetas ut på övriga mätningar och påverka dem. Har vi då ett k-värde på 0.43 kommer den beräknade förbättringen bara att bli 16 mm (43% av 37 mm), d v s den största delen av felet finns utspridd i nätet, fördelad på övriga mätningar, och påverkar resultatet. Detta värde benämns också individuellt k-tal. Ett lågt värde indikerar att fel är svåra att upptäcka för den aktuella mätningen. HMK rekommenderar 0.35 som lägsta värde.
Viktfaktor Den totala beräknade viktfaktorn, vilken beräknas genom 1/s², det vill säga ”Ett genom beräknat apriorimedelfel i kvadrat” för mätningar i plan. Se Mätningar|Viktfaktor höjd för beskrivning av viktsättning i höjdnät. För ett vinkelmedelfel på 0.001 gon blir viktfaktorn 1 000 000. Om vi sedan har angett en annan viktkonstant än 1 för mätningen, kommer även den att räknas in här.
Bäring Ungefärlig bäring för observationen (jämförelsetal).
Längd Ungefärlig längd mellan från- och tillpunkt (jämförelsetal).
Spara polygonpunkter
Spara polygonpunkter
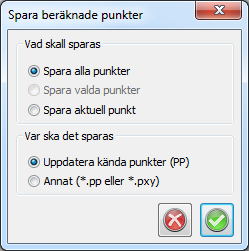
Genom att först ställa dig under fliken Punkter och sedan gå till kommandot Spara så sparas de beräknade punkterna i aktuell polygonpunktsfil (*.PP) eller i databasen. Observera att du måste ha valt fliken Punkter för att kunna använda denna funktion.
Du kan välja mellan att spara alla nya punkter, den aktuella punkt du har markerat eller ett urval av punkterna. Om du vill spara punkterna i en ny fil så skapar du en ny polygonpunktsfil genom Nytt|Polygonpunkter och kopplar den sedan till projektet genom System/Projektinställningar|System|Mätning varpå du väljer den nya filen.
Det finns också en möjlighet att spara beräknade koordinater direkt i valfri fil (Var ska det sparas |Annat).
Avsluta med att spara punkterna enligt beskrivningen ovan.
Lås alla beräknade höjder
Lås alla beräknade höjder
När höjdutjämning genomförts kan man sedan låsa alla beräknade höjder genom att välja Nätutjämning|Lås. Detta låser alla tillgängliga höjder, och kan användas för att spåra alla felaktiga instrument- och signalhöjder.
Spara nätutjämning till ritning
Spara nätutjämning till ritning
Genom att gå till kommandot Nätutjämning|Spara till ritning sparas alla detaljpunkter och även överbestämda punkter ner till valfri ritning. Du får här ange till vilken ritning genom att ange en tidigare sparad, en öppnad eller en helt ny ritning. Observera att man måste ha valt fliken Grafik för att kunna spara till en ritning.
Notera att punkternas koder kan användas för att sortera till olika lager vilket är ett utmärkt alternativ för att skilja data från varandra.
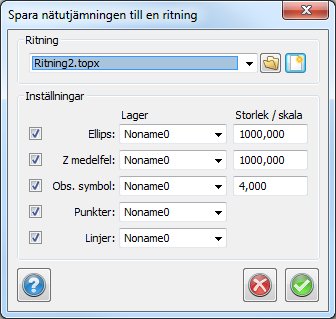
Under Ritning går det att ange om man vill skapa en ny ritning eller välja en befintlig. Vi kan sedan (i samma eller olika lager) välja att spara felellipser för beräknade punkter (Ellips), höjdmedelfel för beräknade punkter (Z-medelfel), observationssymboler för mätningar (Obs. symbol – tvärstreck och pilar), kända och beräknade punkter, samt de linjer som visar mätningarnas sträckning mellan punkter. Efter OK så hamnar man i den skapade ritningen och kan direkt börja arbeta med den. Nätutjämningsdokumentet är fortfarande öppet och ligger i ett fönster bakom ritningen.
Created with the Personal Edition of HelpNDoc: Don't Let Unauthorized Users View Your PDFs: Learn How to Set Passwords